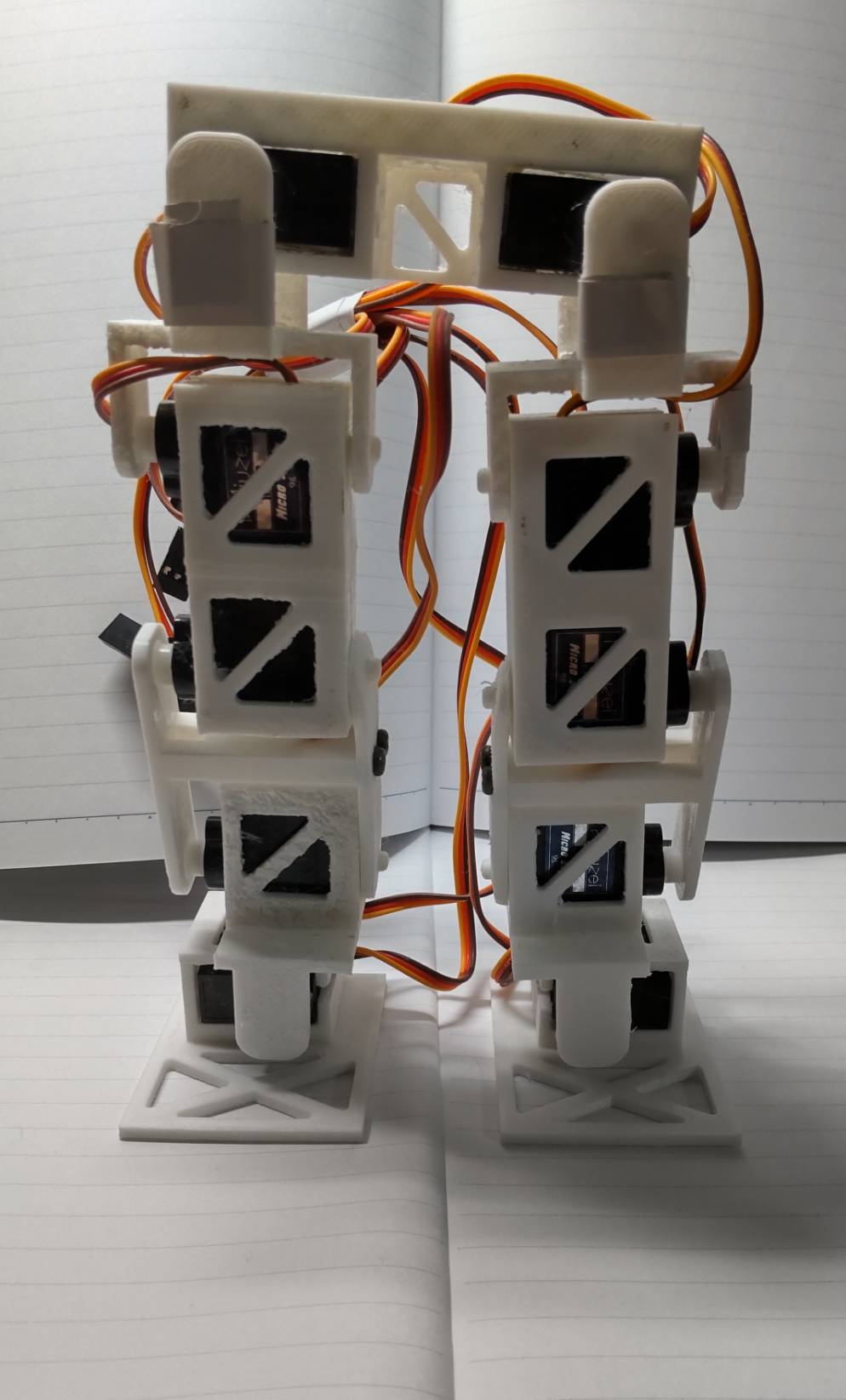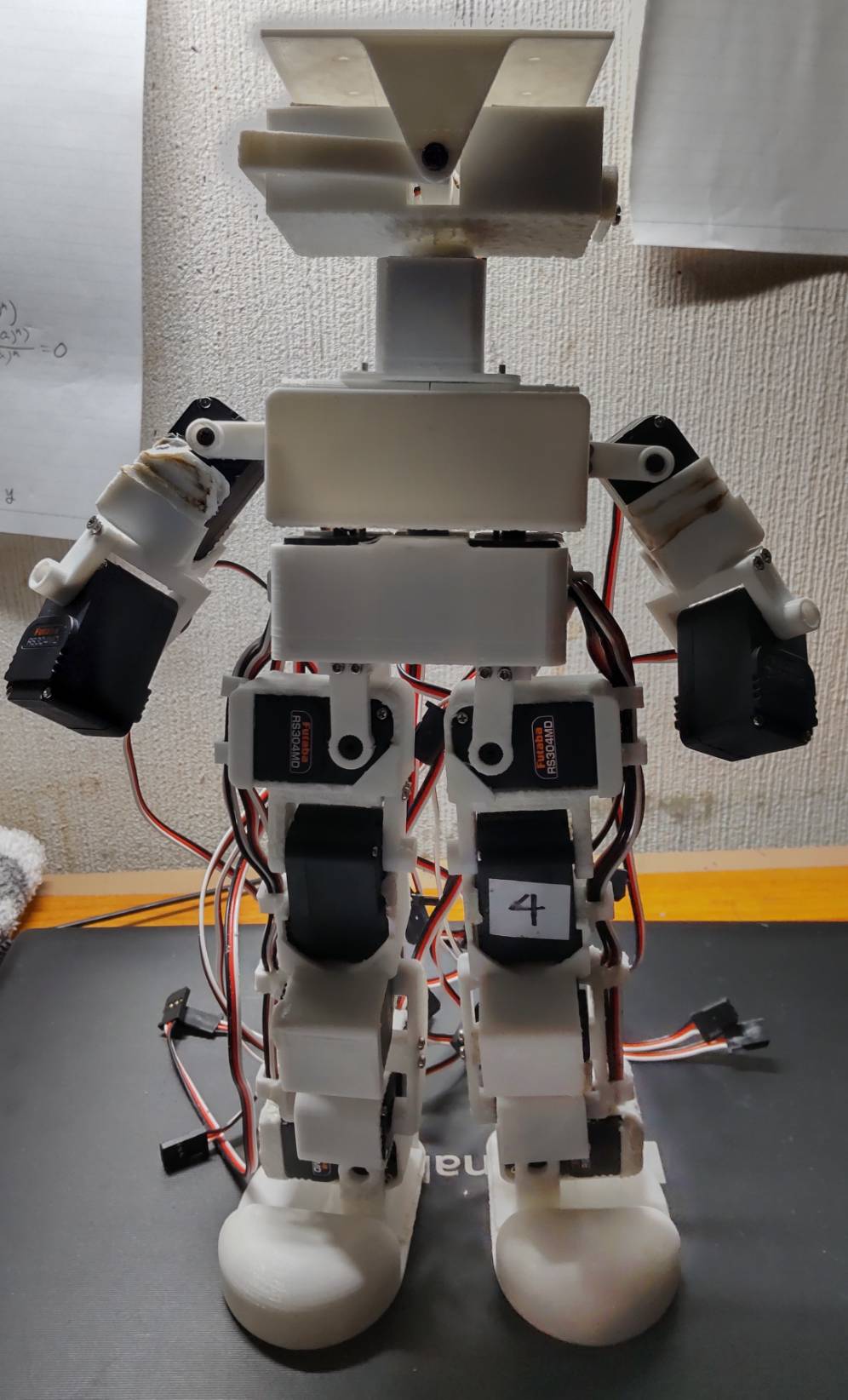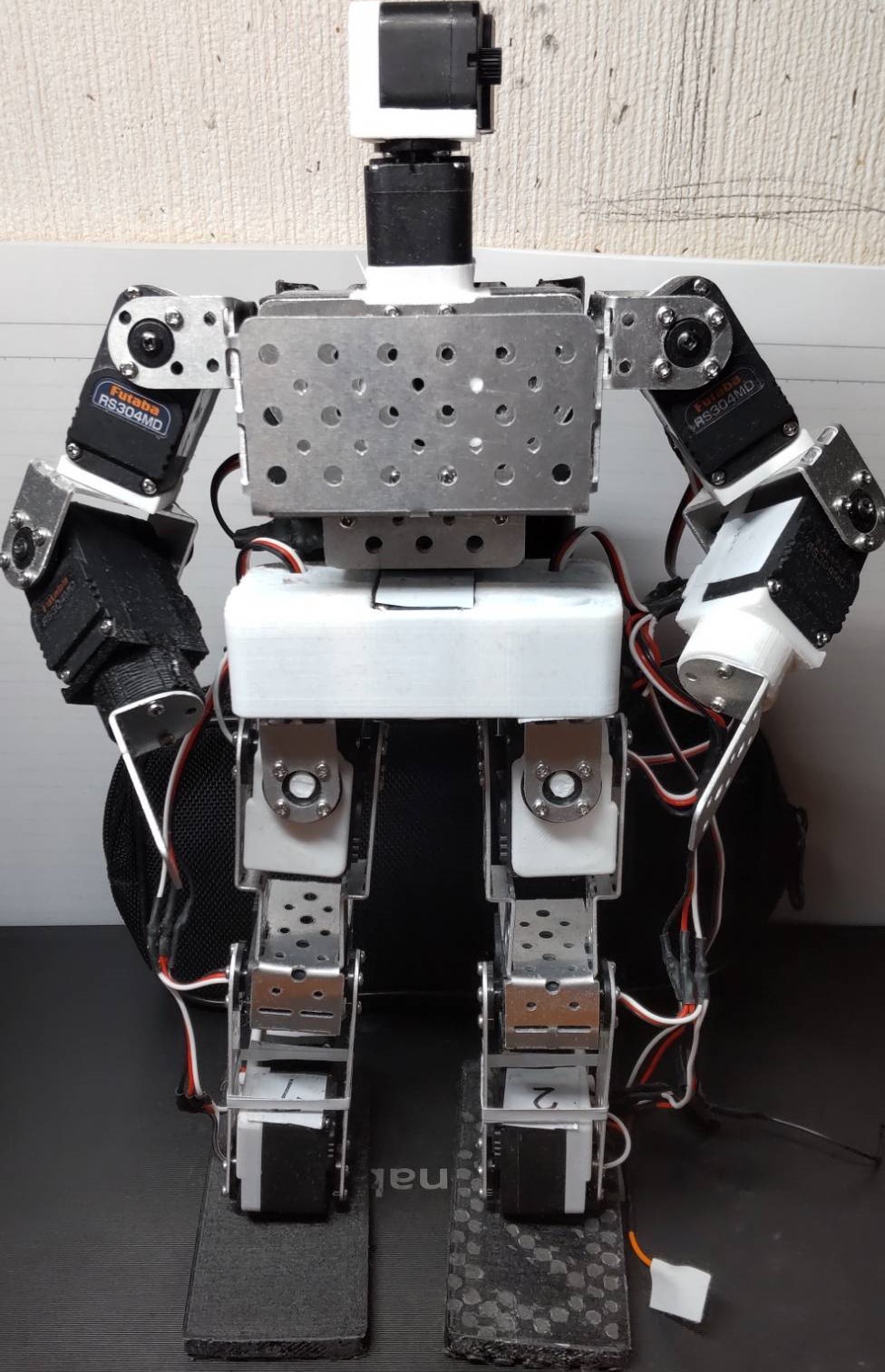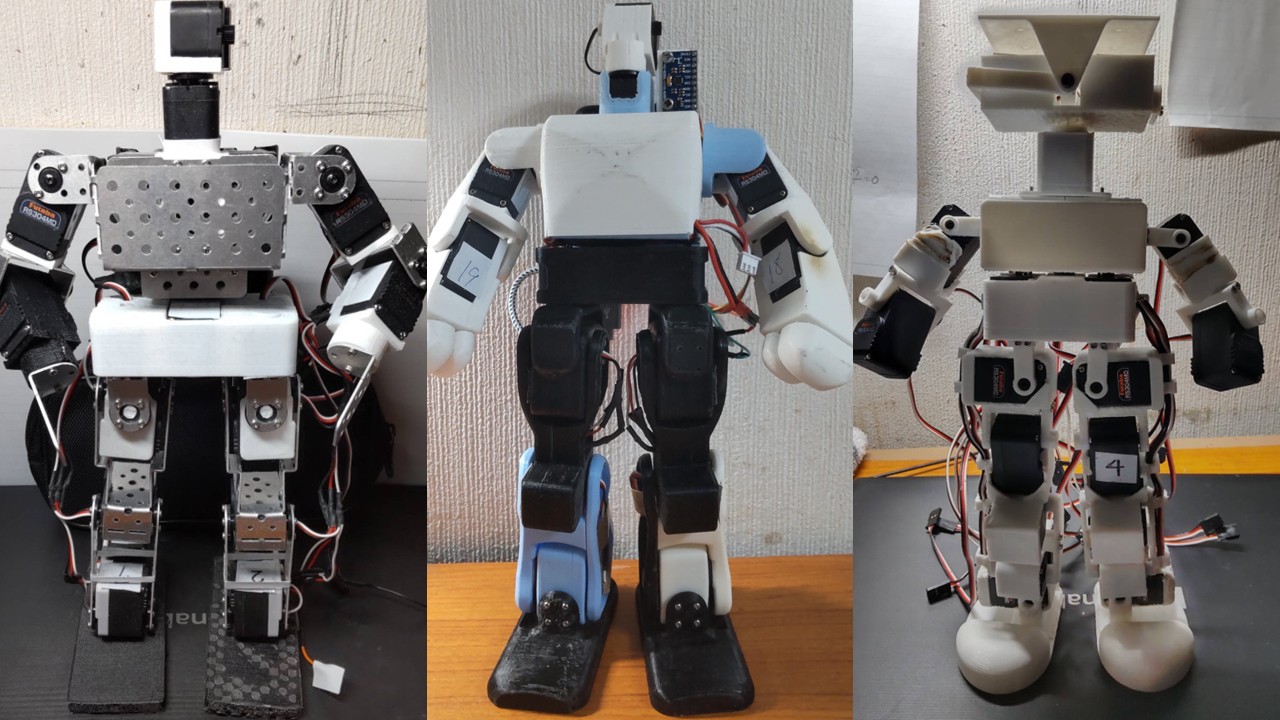
This project involved the development of a modular humanoid educational robot designed to connect the "excitement of seeing a robot move" to learners' curiosity and creativity. By allowing users to freely swap parts like arms and legs, we envisioned a system where learners could grow their robots. Throughout the project, we created six prototypes and addressed technical challenges, steadily improving the robot's design.
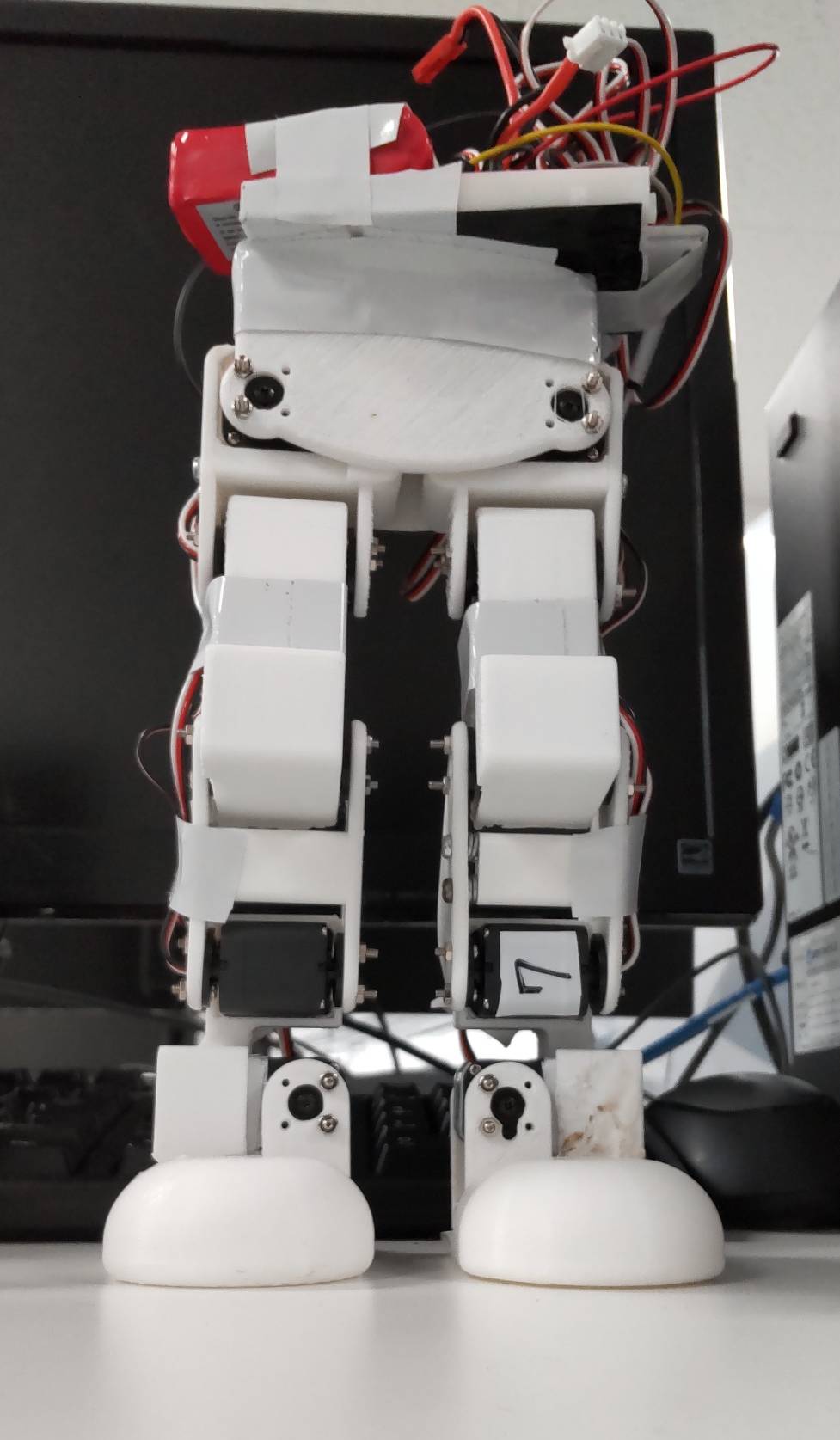
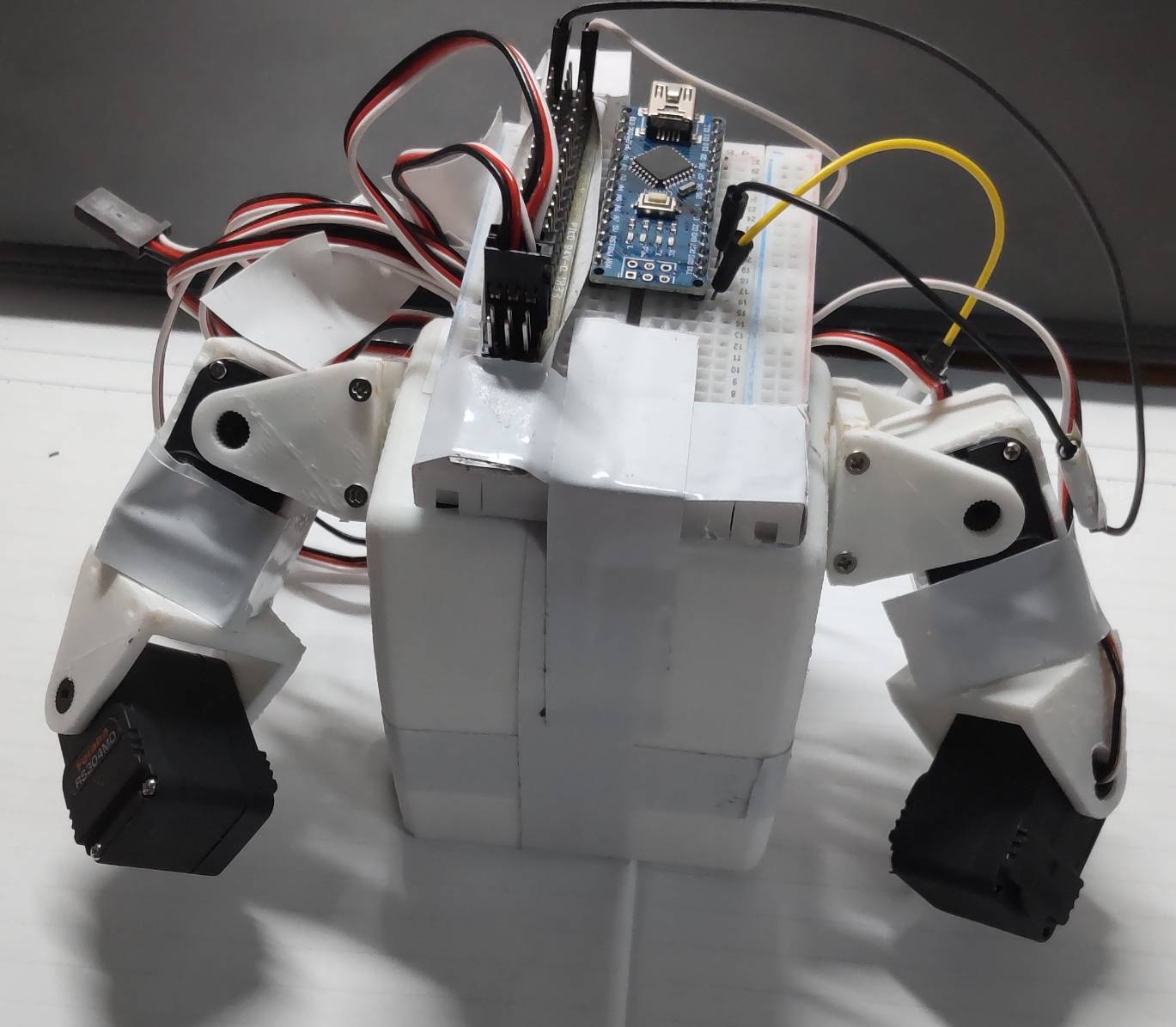
This humanoid robot is designed with the concept of functionality expansion through part swapping. However, swapping parts changes the robot's center of gravity, which makes it unable to walk with a feedforward walking program. To address this, we implemented "feedback walking control theory" using sensors, enabling stable walking with the same program regardless of changes in the robot's weight distribution. By adding feedback processing, the robot was able to walk without falling, even when weights were attached to its arms.
While aiming for functionality expansion through part swapping, further refinement is needed for practical use.
Using sensors to detect and correct tilt, enabling basic walking despite changes in the center of gravity.
Developed learners' thinking skills through a process of goal setting, skill acquisition, and practical application.
Created six prototypes, verifying walking stability and the potential of part swapping functionality.